作者:姜延柏/尹世琛/陈涤新/邹丽
来源:<<起重运输机械>>
编辑转发只为传递更多信息,并不代表本号观点。
如有侵权,请联删。

前言
一、伸缩货叉概述
伸缩货叉为实现在伸出时达到货架上取放货工位,缩回时在穿梭车车体范围内,采用两级差动伸缩结构,由伸缩臂间的拖动系统与驱动系统配合作为传动系统完成货叉的差动伸缩作业。如图1所示,两级拖动系统一端与内固定板相连,另一端绕过滑轮组件与外伸缩臂相连。当中伸缩臂在下方的驱动系统带动下,相对内固定板运动时,中叉板上的滑轮组件以相同速度移动,拖动系统移动端随即拖动外伸缩臂以两倍的差动速度同向运动,完成货叉的远距离伸缩作业。
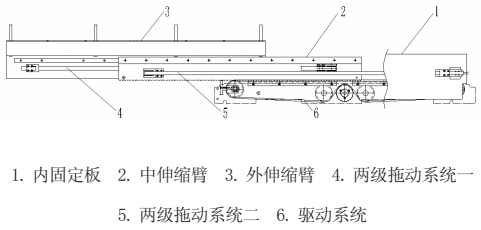
图1货叉伸缩原理图
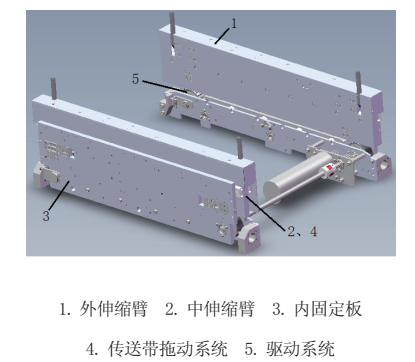
图2 伸缩货叉结构图
二、伸缩货叉参数确定
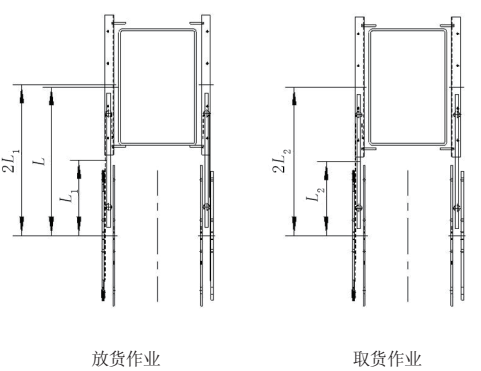
图3伸缩货叉作业示意图
伸缩货叉宽度和间距尺寸如图4所示。伸缩货叉内宽L由料箱尺寸L0和间距S决定,箱间距L1是伸缩货叉宽度B和与料箱间距S之和。L和L1均与S有关,料箱距离S一般为15~25mm,以保证伸缩货叉取放作业过程中料箱发生偏斜时货叉仍能从料箱间隙顺利通过,避免发生碰撞。货叉宽度B作为料箱间距的另一决定因素,应尽量小,以提高货架的空间利用率,这也是货叉研发的难点。
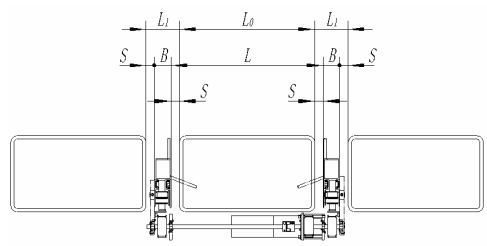
图4 伸缩货叉宽度及间距尺寸图
伸缩货叉高度位置示意如图5所示,需要合理设计货叉底部位置,确保货叉底部位置与货架或者辊道台等设备有足够的高度差(约10mm),使其在取放货作业过程中避免与相关联设备发生碰撞。
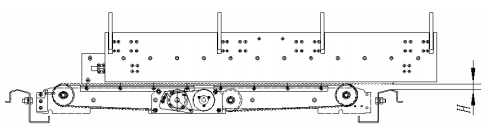
图5伸缩货叉高度位置示意图
速度约为0.5m/s,移载货物质量为40~50kg,移载货物以纸箱或塑料箱为主。伸缩货叉驱动系统电机计算功率

式中:F为料箱前后运动时所受摩擦力,v为料箱运动速度。
电机额定功率
式中:η1、η2、η3分别为电机驱动端同步带系统、货叉下方同步带系统以及传送带拖动系统的传递效率。
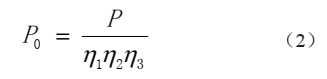
伸缩货叉传动系统由传送带拖动系统和同步带传动系统共同组成,同步带系统驱动中伸缩臂前后移动,中叉齿板上的滑轮组拉动传送带拖动系统运动,带动外伸缩臂对货物进行取放作业,整个传动系统受力分析如图6所示。
图6 传动系统受力分析图
对传送带拖动系统进行受力分析,F1为外伸缩臂拉动货物克服摩擦力所需的拉力,P1为传送带拖动系统伸缩时传送带与滑轮组之间产生的摩擦力,传送带内部所受拉力

由此可得出带动中伸缩臂运动所需要的拉力

对同步带传动系统进行受力分析,F2为拉动中伸缩臂所需的拉力,T1为同步带传动系统同步带与带轮啮合传动时产生的摩擦力,同步带内部所受拉力

传送带拖动系统的平传送带可以其内部所受拉力作为选型依据;同步带传动系统可根据电机功率、输出转速、带轮直径等进行选型,确定同步带齿形及带宽,所选同步带最大牵引力应大于由式(5)计算所得到的同步带内部所受拉力。由此确定伸缩货叉各零部件参数值。
三、伸缩货叉部件结构设计
可以采用如图7所示的结构,将电缆拖链安装在外伸缩臂上方,跟随外伸缩臂在垂直或水平方向移动,但这种拖链结构在转弯处弯曲半径较大,导致外伸缩臂高度或宽度方向尺寸较大,不符合较小外形尺寸的要求。
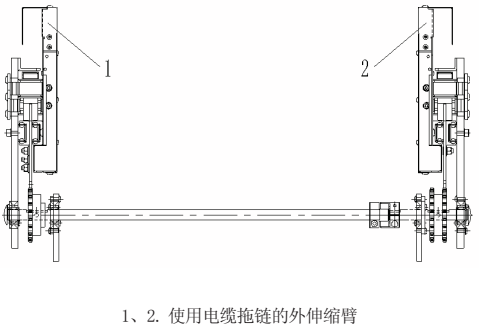
图7 外伸缩臂电缆托链结构图
为使外伸缩臂设计合理、结构简化、整体货叉外形尺寸小,设计的关键在于简化随动供电系统的结构形式。伸缩货叉作业过程中,中伸缩臂上的传送带拖动系统跟随外伸缩臂一起移动,传送带内嵌的钢丝可用作供电和信号传递介质,一端连接车体内的电气模块,另一端连接外伸缩臂内电气模块,传送带拖动外伸缩臂的同时给其内部的减速电机、传感器提供电源并传递信号。外伸缩臂无需复杂的供电系统,由独立、小巧的拨叉模块、控制模块、继电器及其接线组成,包裹在薄护板内部,如图8所示,整个外伸缩臂在满足供电及信号传递要求的同时,结构简单、轻便,可有效缩小料箱之间的间隙,增加密集存储货架货位密度,货架利用率高。

图8外伸缩臂内嵌钢丝传送带供电系统结构图
中伸缩臂是伸缩货叉的主体框架,其上装有滑轨和传送带拖动系统,下方与驱动系统啮合对动力进行中转,如图9所示。
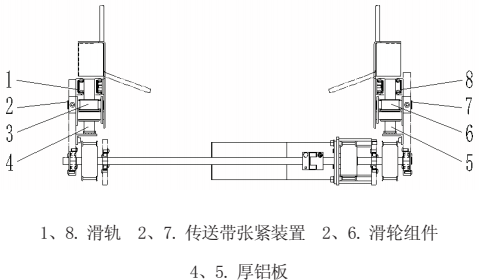
图9 伸缩货叉中伸缩臂结构
驱动系统与中伸缩臂啮合,是伸缩货叉执行伸缩运动的动力源。采用链传动形式,见图10。
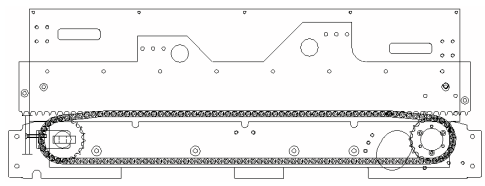
图10 链传动系统结构
同步带传动可以克服上述传动系统的不足。按照同步带传动系统轮系结构布置形式,设计时采用双面齿或单面齿两种聚氨酯同步带组成的驱动系统,由减速电机带动主从动带轮拖动同步带运动,从而带动上方的中伸缩臂运动,如图11所示。
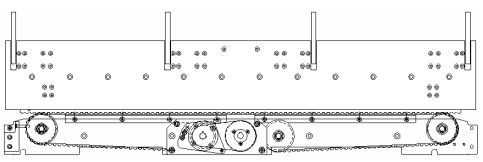
图11 同步带驱动系统
四、结论

作者:姜延柏/尹世琛/陈涤新/邹丽
来源:<<起重运输机械>>
编辑转发只为传递更多信息,并不代表本号观点。
如有侵权,请联删。
